Current Projects
Drone detection and classification
In this project, we will develop a system for automated classification of UAVs and birds using artificial intelligence algorithms. The system will be based on processing data from radar sensor and sensor fusion of radar and camera data.
Description
Detection and tracking of UAVs using radars poses significant challenges because small UAVs typically have a small radar cross-section, fly at lower speed, and mostly at lower altitudes compared to larger aircraft. In addition, it is a nontrivial task to distinguish these small flying objects from birds. Signature detection from birds by itself is a difficult task, as data collection, distinguishing a single bird from a flock of flying birds and distinguishing different types of birds from a distance are all challenging tasks. Until now, several attempts to detect UAVs and distinguish them from birds using various sensors have achieved only limited success. In this project, we will develop a system for automated classification of UAVs and birds using artificial intelligence algorithms. The system will be based on processing data from radar sensor and sensor fusion of radar and camera data.
Members
Dr. Varun Mehta, research associate and NRC Assistant Research Officer, project co-lead
Fardad Dadboud, Ph.D. student, computer vision, deep learning
Hamid Azad, M.Sc. student, localization, tracking
Vaibhav Patel, completed M.Eng., now research associate, computer vision
Dr. Iraj Mantegh, Technology Lead, AI Aerial Robotics and Counter UAS at National Research Council Canada
Dr. Miodrag Bolic, Professor, UOttawa
Industrial Sponsor/Collaborator
NRC
Papers
- X. Zhang, V. Mehta, M. Bolic and I. Mantegh, “Hybrid AI-enabled Method for UAS and Bird Detection and Classification,” accepted for publication in IEEE International Conference on Systems, Man, and Cybernetics (SMC), 2020.
- V. Mehta, M. Bolic, I. Mantegh, C. Vidal, "Detection and classification of drones and birds at a far distance using radar data," NATO Future Forces Forum, 2020
- F. Dadboud, V. Patel, V. Mehta, M. Bolic, I. Mantegh, “Single-Stage UAV Detection and Classification with YOLOV5: Mosaic Data Augmentation and PANet,” The 17th IEEE International Conference on Advanced Video and Signal-based Surveillance, 2021.
BVLOS Inspection of critical logistics infra- and superstructures using coordinated multiple UAS
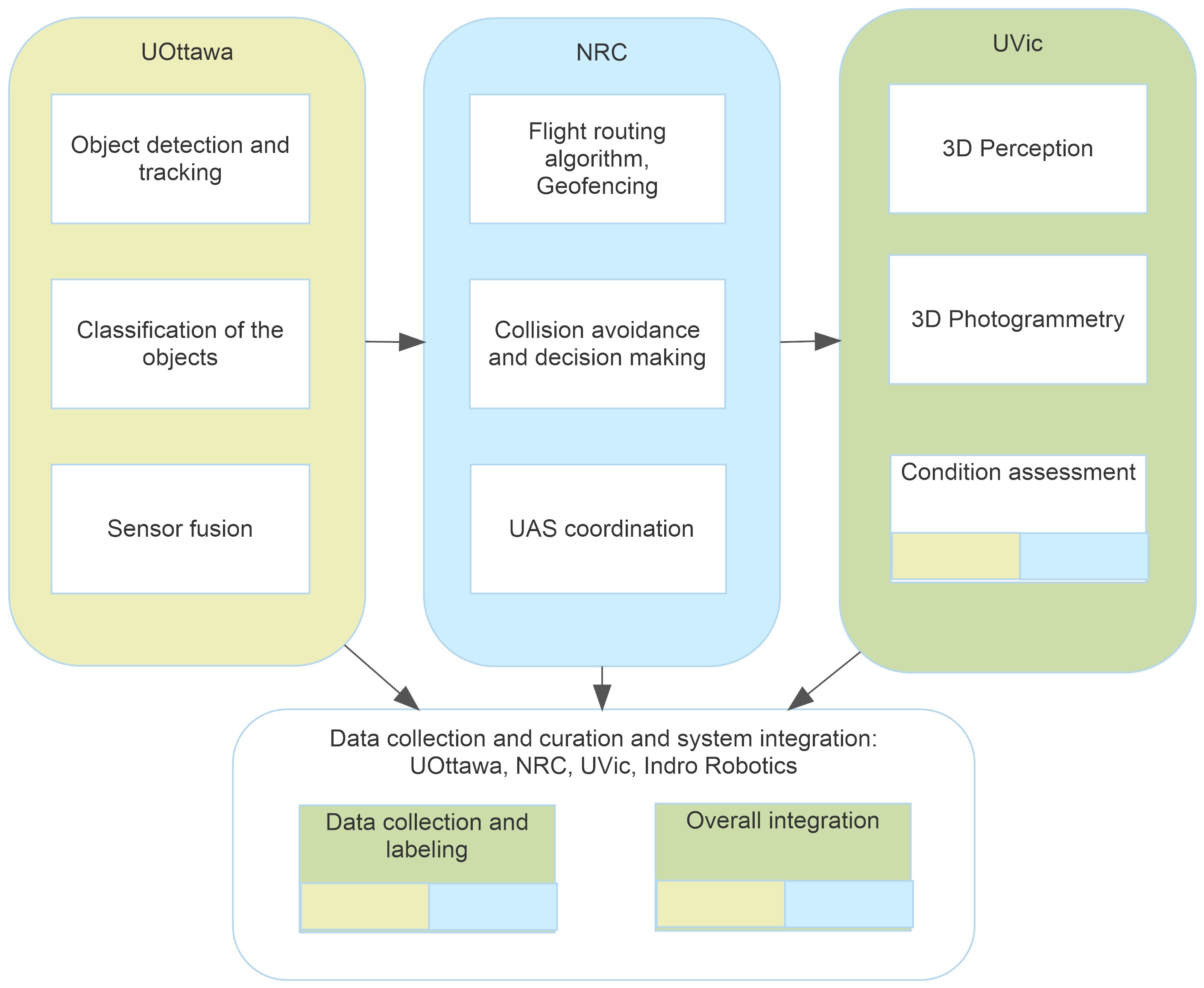
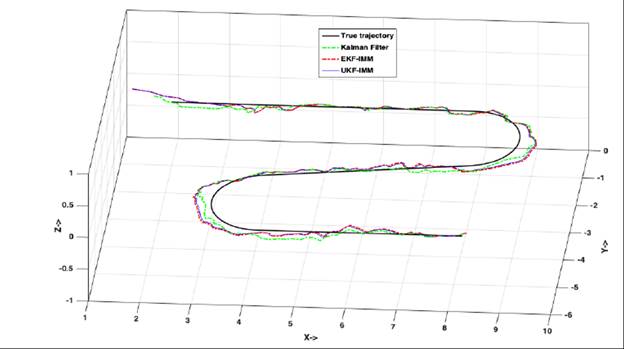
The research and technical developments sought in this project will enable UAS platforms to perform inspection, monitoring, and modeling the state of critical infra and superstructure in the BVLOS (Beyond Visual Line of Sight) mode, safely from a remote location. The threat detection and collision avoidance methods will provide the critical capability for BVLOS navigation of multiple drones to and around the infrastructure.
Description
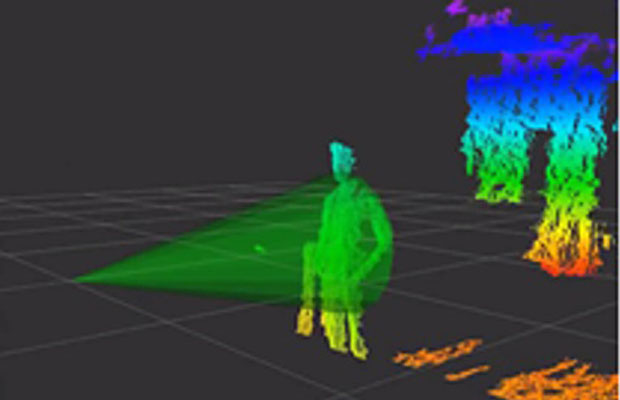
This project will involve data collection for detection, classification and collision avoidance (UOttawa and NRC) and for visual inspection of objects (UVic). We will perform hardware integration in order to add a radar to an UAS platform, software development and development of AI algorithms and models for object classification, collision avoidance, 3D object recognition and pose estimation. In the end of the project we will be able to demonstrate a system of two UASs flying the beyond visual line of sight and performing aerial high-precision photogrammetry and visual inspection of the object of interest. In addition, we will develop off-line condition assessment system to automatically interpret and report anomalies after inspection.
Members
Dr. Varun Mehta, research associate and NRC Assistant Research Officer, project co-lead
Fardad Dadboud, Ph.D. student, computer vision, deep learning
Hamid Azad, M.Sc. student, localization, tracking
Dr. Iraj Mantegh, Technology Lead, AI Aerial Robotics and Counter UAS at National Research Council Canada
Dr. Miodrag Bolic, Professor, UOttawa
Industrial Sponsor/Collaborator
NRC, University of Victoria
Papers
- S. Hatami, F. Dadboud, et al., "Depth Completion and Object Detection: Exploring and Exploiting Complementarities," submitted to ICRA2023.
Handling uncertainty in IOT systems
In this project we will address decision making with uncertainty in the cloud based on data coming from multiple sensors where sensors can represent Internet of Things (IoT) nodes, wearable medical devices or any other intelligent sensors on the edge.
Description
In this project we will address decision making with uncertainty in the cloud based on data coming from multiple sensors where sensors can represent Internet of Things (IoT) nodes, wearable medical devices or any other intelligent sensors
on the edge. We are interested in providing decision with confidence levels in a given deadline and therefore our algorithms need to be scalable and computationally efficient.
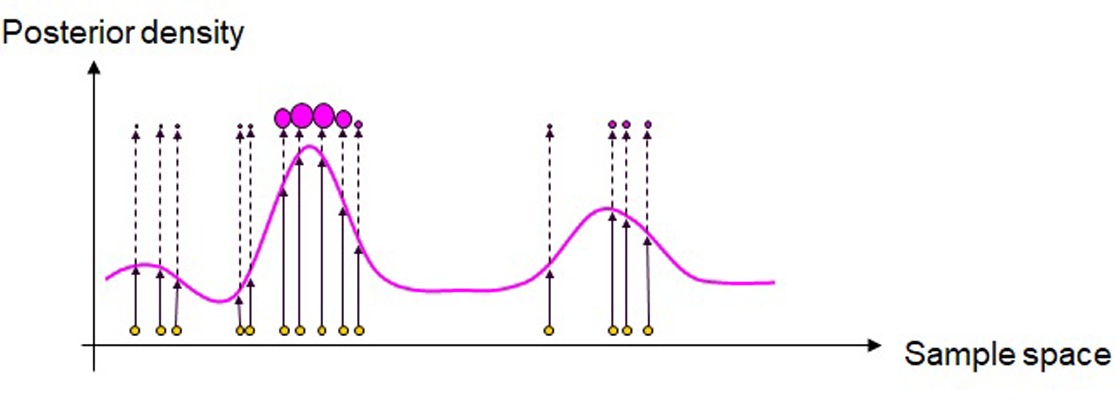
Statistical data analytics and processing of sensor data is commonly based on linear and Gaussian mathematical models. These assumptions allow us to propagate uncertainty or to perform estimation of unknown parameters analytically. In case
variables are statistically dependent, model is non-linear or non-Gaussian, it might not be possible to have analytical solution to the problem. With the advancement of computational statistics and Bayesian approach, processing data related
to complex, non-linear and non-Gaussian systems has become feasible. Propagation of uncertainties based on Monte Carlo methods or other approximation methods can be universally applied and it is conceptually simple but can increase
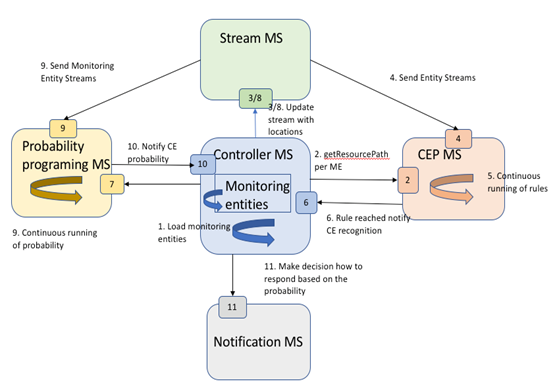
computational requirements by several orders of magnitude. Current solutions for implementing that Bayesian solutions are based on probabilistic programming. In this project, we will define a framework for probabilistic computing of sensor
IoT data on the cloud. It will be based on Java and probabilistic programming language Figaro.
Several research problems are/will be tackled:
- Heterogeneous data from the devices will be collected and fused on the cloud. We will define Bayesian networks that would allow for combining heterogeneous data.
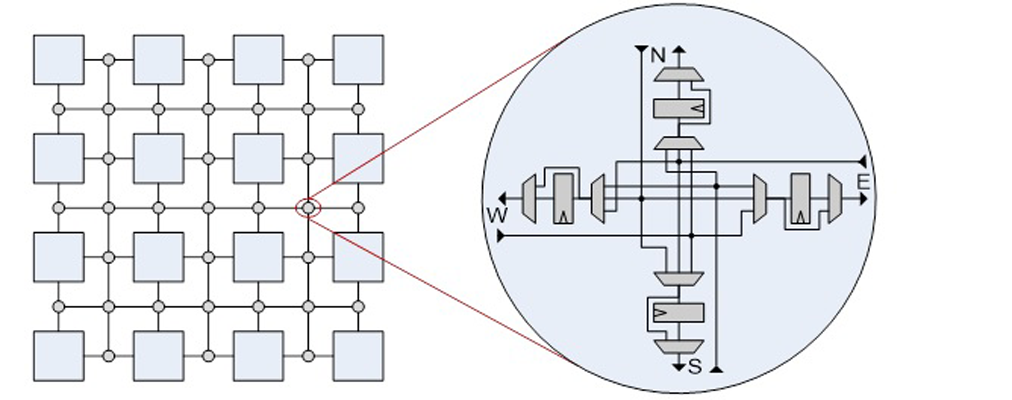
- Current published approaches for uncertainty quantification of large number of sensor data are based on simplified examples. We will propose scalable big data architecture for IoT systems. We will explore scalability of the approach presented in the research direction 1 in processing data on the cloud while optimizing usage of computational resource and achieving deadline for decision making.
Members
Mira Vrbaski
Dr. Shikharesh Majumdar
Dr. Miodrag Bolic
Industrial Sponsor/Collaborator
Funding: None
Published Papers and Reports
- M. Vrbaski, M. Bolic, S. Majumdar, “Complex Event Recognition Notification Methodology for Uncertain IOT Systems Based on Micro-Service Architecture,” FiCloud 2018.